Chronorobotics Laboratory develops methods enabling long-term deployment of autonomous robots in natural environments.
Design and implement a method that would enable mobile robots to use vision-based navigation on a 24/7 basis.
Design and implement a system to perform lifelong visual SLAM inside of a beehive
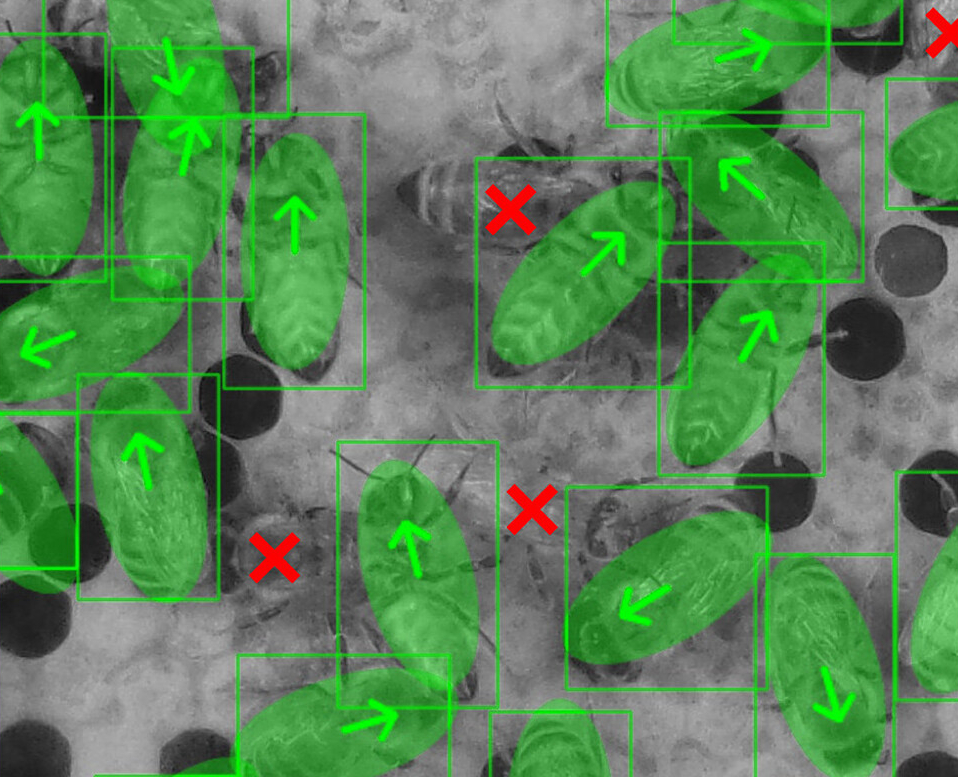
Design, and implement a computer vision method capable to detect worker bees in a beehive
Design, implement and experimentally evaluate a method that adapts a map used by mobile robots to the environmental changes
Design, implement and evaluate a method that can track evolution of individual comb cells in a honeybee colony
Design, implement and experimentally evaluate a multicamera system for marker-based localisation