We develop micro-robots that can inspect honeycomb cells with the aim of turning honeybee colonies into sensor networks for continuous, long-term ecological surveillance .
Lifelong learning for autonomous robots

Tomáš Krajník
Associate Professor - Head of Lab


This bilateral France - Czech project aims to improve acceptance of mobile robots through the integration of lifelong learning methods into the modules that constitute the core of their navigation systems.
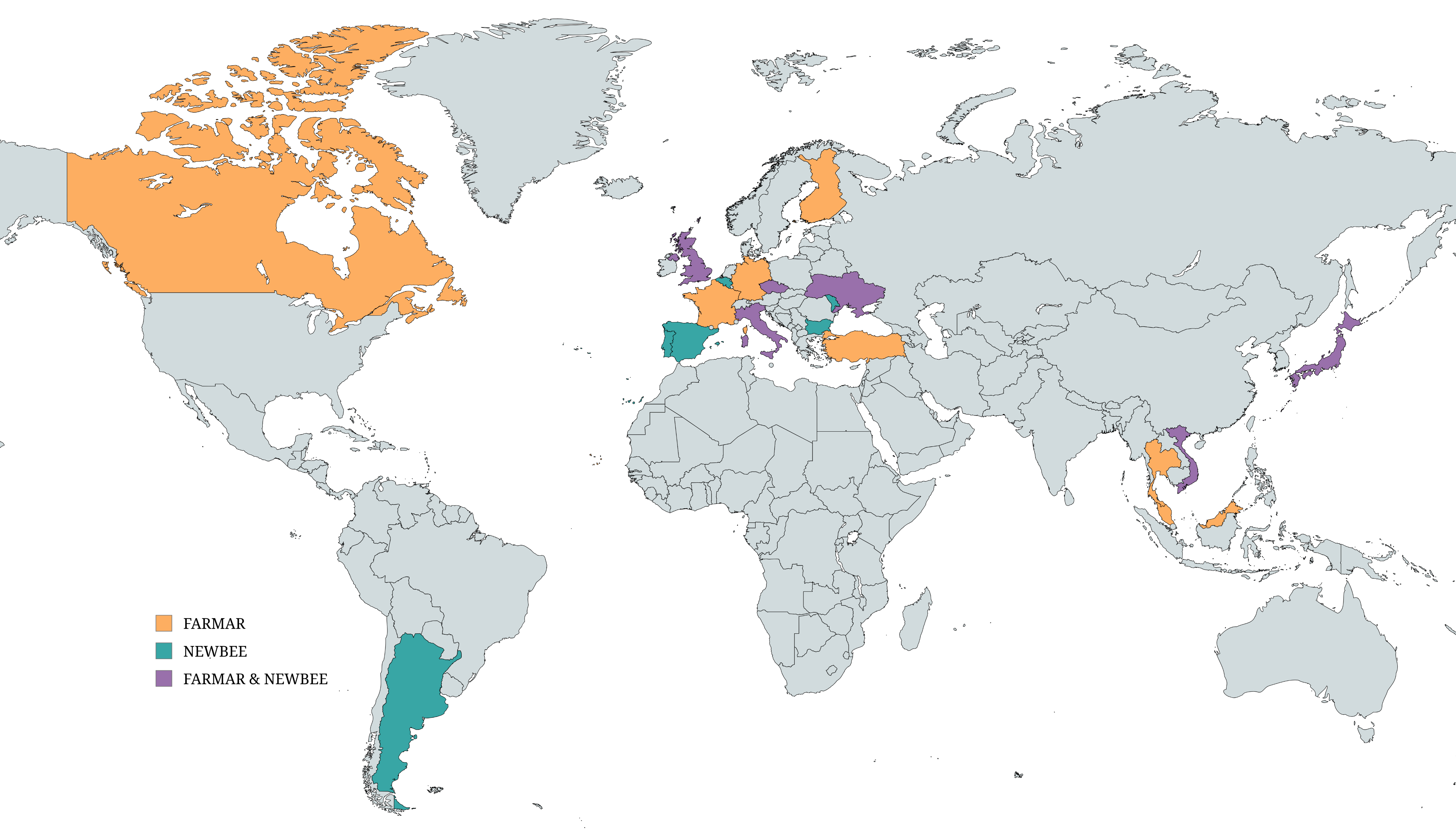
3L4AR is a researcher mobility project between the Chronorobotics Lab at the Czech Technical University in Prague (CTU) in Czechia and the CIAD Lab at the University of Technology of Belfort-Montbéliard (UTBM) in France. The project aims to improve acceptance of mobile robots through the integration of lifelong learning methods into the modules that constitute the core of their navigation systems. We argue that the robustness of the navigation systems in dynamic environments and changing conditions can be improved during the robot routine operation through machine learning methods. The incorporation of lifelong learning would allow the robots to gradually improve their ability to perceive, understand and exploit the environmental dynamics caused by natural processes and human activities. Understanding of the environment dynamics will allow the robots to anticipate and to react more intelligently to the everyday situations, which will improve their acceptance by humans.
Researchers
Tomáš Krajník
Associate Professor - Head of Lab

Tomáš Rouček
Senior PhD student

Zdeněk Rozsypálek
Senior PhD student
Jiří Ulrich
Senior PhD student

Jan Blaha
Senior PhD student